OctoSLAM - Punktwolke zu Octree Konverter für ORBSlam2 (SoSe 2016)
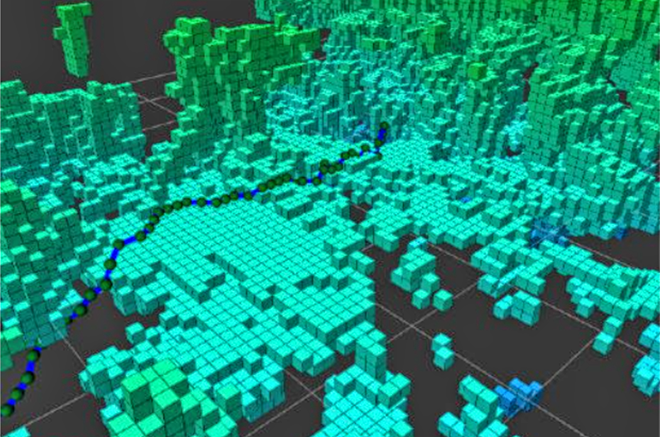
OctoSLAM ist ein Robot Operation System (ROS) Paket zur Konvertierung von Punktwolken in OctoMap. Dieses probabilistische Mapping-Framework bietet Lösungen für Roboteranwendungen und Navigation auf den Gebieten der probabilistischen Darstellung und Modellierung von unkartierten Gebieten.