SLAM für UAS (WiSe 2014/15, SoSe 2015)
- Projektziele
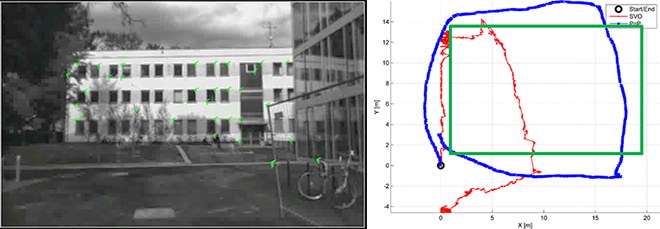
- Gleichzeitige Lokalisierung und Kartierung (SLAM) für unbemannte Luftfahrtsysteme (UAS)
- Das Problem, bei dem ein mit Sensoren ausgestatteter mobiler Roboter eine Karte für eine unbekannte Umgebung erstellt und sich gleichzeitig relativ zu dieser Karte lokalisiert
- Erforderlich
- Gute Programmiererfahrungen in C
- Tiefes mathematisches Verständnis
- Gut zu wissen
- Vorlesungen: Photogrammetrische Computer Vision Bildanalyse und Objekterkennung
- Seminar: 3D-Rekonstruktion aus Bildern
- Weitere Lektüre
- Grzonka, S.; Grisetti, G.; Burgard, W., "A Fully Autonomous Indoor Quadrotor," IEEE Transactions on Robotics, vol.28, no.1, pp.90, 100, Feb. 2012