OctoSLAM - Point Cloud to Octree Converter for ORBSlam2 (SoSe 2016)
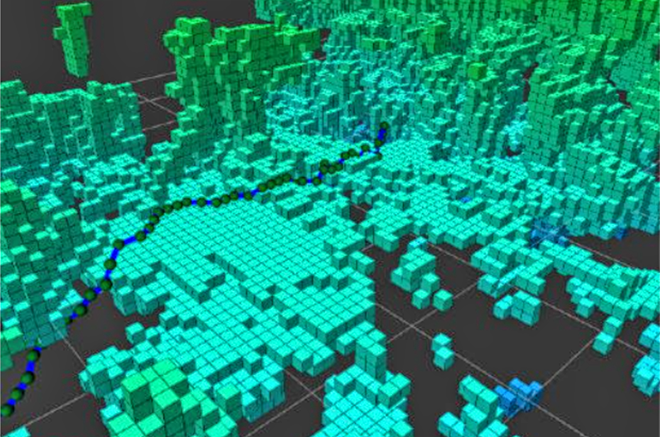
OctoSLAM is a robot operation system (ROS) package to convert point clouds to OctoMap. This probabilistic mapping framework offers solutions for robotic applications and navigation on the fields of probabilistic representation and modeling of unmapped areas.