
After deciding to use the stretch sensor since it is very reliable, we tested different positions where a stretch sensor could measure something.
The first place we tried was under the arm. You can see a resting arm (arm down), an outstretched arm (arm up), and an arm extended to the side (half position)


Here are some graphs:


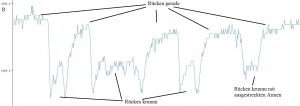
Arm unten = Arm is down, Arm oben = Arm is up, halbe Position = half position = Arm is outstretched to the side, langsames Heben = raising the arm slowly, schnells Heben = raising the arm quickly, langsames Senken = lowering the arm slowly, schnelles Senken = lowering the arm quickly
You can distinguish very well between the arm being up and the being down. The middle position can only sometimes be tracked, it worked better when raising the arm to this position then when lowering the arm into this position.
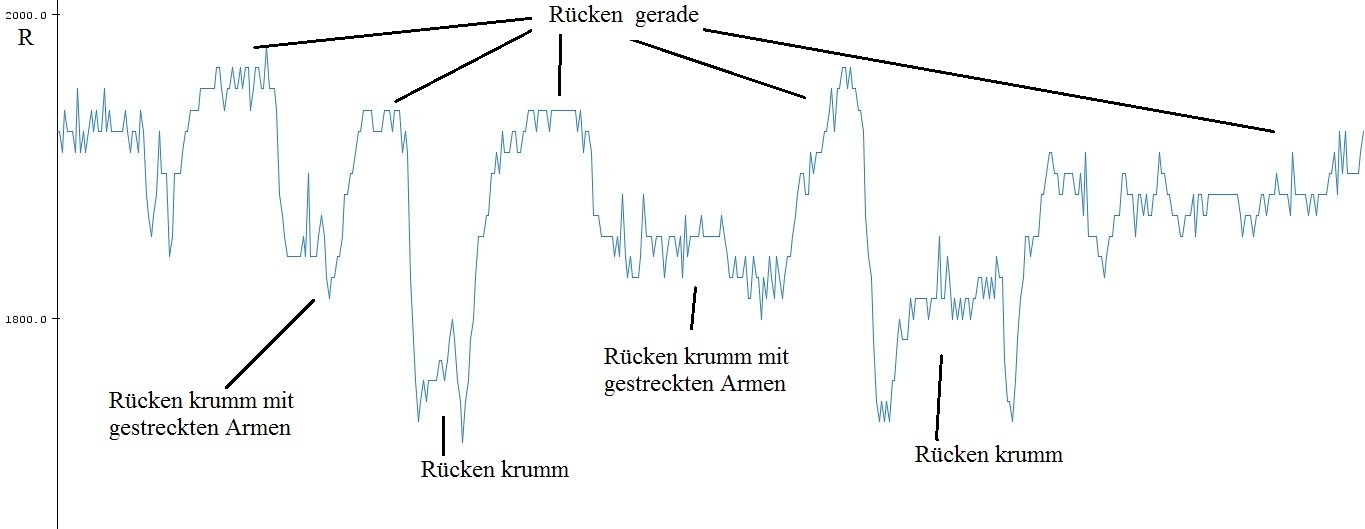
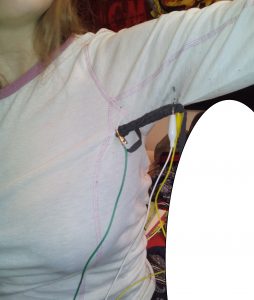
We then tried attaching the sensor to the back. You can see the bent back, and the stretched or straight back.


And here are the graphs:
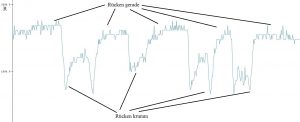
Rücken gerade = straight back, Rücken krumm = bent back, Rücken krumm mit ausgestreckten Armen = bent back and arms strectched out, Rücken nach hinten = backwards bent back
You can see the difference between a bent back and a straight back very well, further tests must follow to distinguish if it is possible to decide from the data in which direction the back is bent, but the outlook seems positive (also see neck).
And finally we tried to apply the stretch sensor to the neck. Therefore it was attatched to a hairtie and to the collar of the sweater. You can see the bent neck (forward), the straight neck, and the neck bent backwards.



here are the graphs:
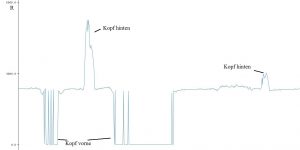

Kopf hinten = head bent backwards/looking up, Kopf vorne = neck bent forward/looking down, Kopf gerade = neck is straight/looking forward. It is very easy to distinguish between all three positions. But it is not possible to figure out if the person is tilting their head to the left or right, or if she is looking left or right.
Take-away: The stretch sensors work very well to distinguish between straight and bent body parts, but they must be calibrated exactly to the person. Changing length of the sensor or its attachment position seems to have quite an influence on the data.
The code used is the following:
void setup() {
pinMode(8,OUTPUT);
Serial.begin(9600);
}
void loop() {
float sensorvalue = analogRead(A0);
float U = 5 * sensorvalue/1023;
float R = 10000 * U/(5-U);
Serial.println(R);
delay(100);
}