Converting a physical specimen into a finite element model typically involves several
steps.
First, the
specimen's geometry must be accurately measured and modelled in the software. If there
is
symmetry, one
can
exploit that by adding supports, as the stresses and strains are usually just mirrored
images. By doing
so,
the calculation time is significantly saved.
Next, the material properties of the materials used in the specimen must be determined
and
input into
the
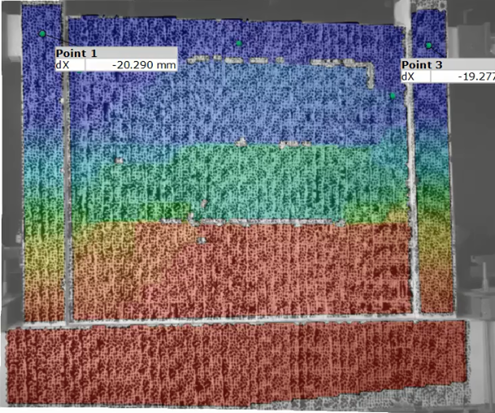
software. This information can be obtained through testing and experiments or by using
values found in
the
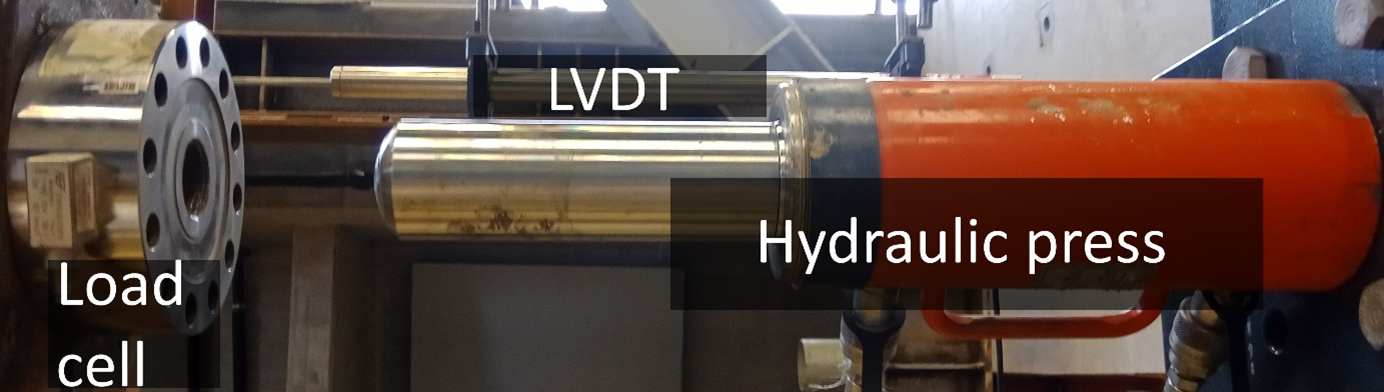
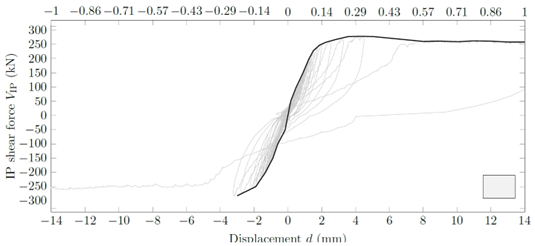
literature. In this example, we had tests of each material involved in the specimen and
that
of the
in-plane
test that you can see on this screen.
Once the geometry and material properties have been established, boundary conditions
must be
defined to
reflect the conditions of the physical specimen. This includes constraints, such as
fixed or
pinned
supports, and loads, such as gravity or externally applied forces.
Next, the finite element mesh must be created, dividing the specimen into smaller
elements
suitable for
numerical analysis. The mesh must be fine enough to capture important details in the
specimen, but
coarser
elements can also help speed up the calculation time.
Finally, the finite element analysis is performed using the software, in this case,
Atena,
using the
defined
geometry, material properties, boundary conditions, and mesh. The analysis results can
then
be compared
to
the results from physical testing to validate the model and refine the material
properties
as necessary.
In summary, creating a finite element model of a physical specimen requires
understanding
the specimen's
geometry, material properties, and loading conditions, as well as a detailed mesh and
proper
analysis
setup
within the software.